 Pendulums are the defining feature of pendulum clocks, of course, but today they don’t elicit much thought. Most modern “pendulum” clocks simply drive the pendulum to provide a historical look, but a great deal of ingenuity originally went into their design in order to produce highly accurate clocks. This essay explores horologic design efforts that were so important at one time—not gearwork, winding mechanisms, crutches or escapements (which may appear as later essays), but the surprising inventiveness found in the “simple” pendulum itself.
Pendulums are the defining feature of pendulum clocks, of course, but today they don’t elicit much thought. Most modern “pendulum” clocks simply drive the pendulum to provide a historical look, but a great deal of ingenuity originally went into their design in order to produce highly accurate clocks. This essay explores horologic design efforts that were so important at one time—not gearwork, winding mechanisms, crutches or escapements (which may appear as later essays), but the surprising inventiveness found in the “simple” pendulum itself.
It is commonly known that Galileo (1564-1642) discovered that a swinging weight exhibits isochronism, purportedly by noticing that chandeliers in the Pisa cathedral had identical periods despite the amplitudes of their swings. The advantage here is that the driving force for the pendulum, which is difficult to regulate, could vary without affecting its period. Galileo was a medical student in Pisa at the time and began using it to check patients’ pulse rates.
Galileo later established that the period of a pendulum varies as the square root of its length and is independent of the material of the pendulum bob (the mass at the end). One thing that surprised me when I encountered it is that the escapement preceded the pendulum—the verge escapement was used with hanging weights and possibly water clocks from at least the 14th century and probably much earlier. The pendulum provided a means of regulating such an escapement, and in fact Galileo invented the pin-wheel escapement to use in a pendulum clock he designed but never built. But it took the work of others to design pendulums for truly accurate clocks, and here we consider the contributions of three of these: Christiaan Huygens, George Graham and John Harrison.
It was Christiaan Huygens (1629-1695) who built the first pendulum clock as we know it on Christmas, 1656. His pendulum swung in a wide arc of about 30° and consisted of a metal ball suspended by silk threads. There are a few design aspects of pendulums that may appear obvious in retrospect but which were novel enough at the time. First, there is the matter of air and gear friction. To minimize these effects there must be sufficient mass to make frictional forces irrelevant, the rod of the pendulum should be thin, and the pendulum must be enclosed to avoid drafts. It is also true, unlike in Huygen’s pendulum, that the bob itself should be thin—later bobs were made to slice through the air, and this feature along with the requirement for significant mass results in the tapered lens-shaped disk that we see today on pendulums.
 The second design feature we see in this clock design of Huygens is the concentration of mass at the bottom of the pendulum. While the mass itself does not contribute to the period of the pendulum (after frictional forces are overcome), the length of the pendulum certainly does, and this length is measured from the pivot point to the center of mass of the pendulum. The common “seconds” pendulum (which actually has a two-second period) is convenient for gearing ratios since most clock escapements move the seconds hands on each swing, and this pendulum has a length of a little over 39 inches. Huygens and Christopher Wren proposed this distance as a standard unit of length, but were unaware at that time of the geographic variation of this length (in 1793 the meter was standardized as one ten-millionth of the distance between the North Pole and equator based on curvature estimates from triangulations by Delambra and Mechain). Later measurements by Jean Richter of this geographic variation led Huygens to assign this variation to centripetal force from the Earth’s rotation, which is indeed latitude dependent. The “seconds” length requirement makes for non-portable pendulum clocks, particularly if the center of mass of the pendulum is not as low as possible (and also exacerbated if the pendulum has a wide swing to accommodate as in Huygens’ first clock).
The second design feature we see in this clock design of Huygens is the concentration of mass at the bottom of the pendulum. While the mass itself does not contribute to the period of the pendulum (after frictional forces are overcome), the length of the pendulum certainly does, and this length is measured from the pivot point to the center of mass of the pendulum. The common “seconds” pendulum (which actually has a two-second period) is convenient for gearing ratios since most clock escapements move the seconds hands on each swing, and this pendulum has a length of a little over 39 inches. Huygens and Christopher Wren proposed this distance as a standard unit of length, but were unaware at that time of the geographic variation of this length (in 1793 the meter was standardized as one ten-millionth of the distance between the North Pole and equator based on curvature estimates from triangulations by Delambra and Mechain). Later measurements by Jean Richter of this geographic variation led Huygens to assign this variation to centripetal force from the Earth’s rotation, which is indeed latitude dependent. The “seconds” length requirement makes for non-portable pendulum clocks, particularly if the center of mass of the pendulum is not as low as possible (and also exacerbated if the pendulum has a wide swing to accommodate as in Huygens’ first clock).
Mahoney points out that Huygens’ invention of the pendulum clock contained an important feature: the independent suspension of the pendulum and the crutch linked the clock mechanism and the pendulum, but in a way that allowed separate, one-way adjustments. The driving force of the escapement could be adjusted without affecting the operation of the pendulum, and varying the characteristics of the bob (such as increasing the bob mass to overcome variations in crutch coupling or streamlining it to decrease air resistance) did not affect the operation of the escapement. This allowed a practical means of calibrating the individual components. Also, the silk threads of the pendulum rod in this design were extremely light and strong with little stretch and high resistance to rot, and they also minimized friction at the pivot point. They were ideal for Huygens.
 But the silk threads offered a huge advantage in one other way—they allowed the effective length of the pendulum to vary so the pendulum is truly isochronic. It had been discovered by Marin Mersenne (1588-1648) that the period of the pendulum does indeed depend on the amplitude of its swing, with isochronism true enough only for small angles. Wider swings produce slightly longer periods in the same proportion as sin x varies from x as the angle x increases. This error is called the circular error or circular deviation. The wrapping of the silk threads through the “cheeks” seen in the clock diagram effectively shorten the pendulum length with its distance along its arc, constraining the pendulum to a cycloidal path and providing true isochronism. Huygens revolutionized the design of pendulums through such mathematical analysis of this and other characteristics of pendulums.
But the silk threads offered a huge advantage in one other way—they allowed the effective length of the pendulum to vary so the pendulum is truly isochronic. It had been discovered by Marin Mersenne (1588-1648) that the period of the pendulum does indeed depend on the amplitude of its swing, with isochronism true enough only for small angles. Wider swings produce slightly longer periods in the same proportion as sin x varies from x as the angle x increases. This error is called the circular error or circular deviation. The wrapping of the silk threads through the “cheeks” seen in the clock diagram effectively shorten the pendulum length with its distance along its arc, constraining the pendulum to a cycloidal path and providing true isochronism. Huygens revolutionized the design of pendulums through such mathematical analysis of this and other characteristics of pendulums.
 A cycloid is the curve defined by the path of a point on the edge of a circle as it rolls along a straight line, as shown in Huygens’ figure on the left. It is a tautochrone, a curve for which a frictionless particle sliding on it under gravity to its lowest point will take the same amount of time regardless of its starting position on the curve. By definition an isochronic pendulum needs to follow a tautochronic path.
A cycloid is the curve defined by the path of a point on the edge of a circle as it rolls along a straight line, as shown in Huygens’ figure on the left. It is a tautochrone, a curve for which a frictionless particle sliding on it under gravity to its lowest point will take the same amount of time regardless of its starting position on the curve. By definition an isochronic pendulum needs to follow a tautochronic path.
But let’s back up a bit to see how Huygens found this curve. In deriving the relation for the period of a pendulum in 1659 equivalent to T = 2π(L/g)1/2, Huygens found he had to make an approximation that was only negligible for small amplitudes of oscillation, one that defined a curved path of a cycloid with a vertical axis of half the pendulum length L. In one of those fortuitous circumstances that occur so frequently in history, he had studied precisely that curve for a mathematical challenge issued by Blaise Pascal in 1654. Following this lead Huygens found that a body falling from any point along the cycloid will reach the bottom in the same amount of time, and the ratio of this time to the time for free fall from rest along the axis of the cycloid is π : 2. In 1673 he published his masterpiece, the Horologium Oscillatorium, 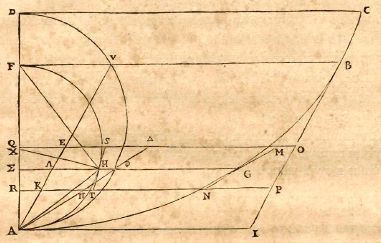 in which he directly proved that the cycloid was the needed curve for an isochronous pendulum.
in which he directly proved that the cycloid was the needed curve for an isochronous pendulum.
To derive this, Huygens begins by presenting the Galilean properties of free-fall, i.e., that the distance fallen is proportional to both the time squared and the velocity squared. In addition, the distance fallen in a given time is equal to the distance traversed in the same time with a constant velocity half that of the velocity at the end of the fall. After proving 20 more propositions too detailed to present here, he arrives at the figure to the right. Here the arc ABC is a cycloid created by point A as the circle AVD rolls along the top line DC. As translated from the Latin by Blackwell, Huygens states and then proves that:
The time in which a body crosses [spans] the line MN, with the uniform velocity acquired after it has fallen through the arc BG of the cycloid, will be related [proportional] to the time in which it would cross the line OP, with half of the uniform velocity which it would acquire by falling through the whole tangent BI, as the tangent ST is related to the part QR of the axis.
After one more proposition in which he considers infinitesimal arcs of travel along the cycloid (we’ll touch on that later), Huygens arrives at the culmination of Part II of his work:
On a cycloid whose axis is erected on the perpendicular and whose vertex is located at the bottom, the times of descent, in which a body arrives at the lowest point at the vertex after having departed from any point on the cycloid, are equal to each other; and these times are related to the time of a perpendicular fall through the whole axis of the cycloid with the same ratio by which the semicircumference of a circle is related to its diameter.
where the last clause provides the π : 2 ratio mentioned earlier.
 So an isochronous pendulum must be constrained to move along a cycloidal path. Huygens needed to find the curve (the evolute) that would “unwind” to form this cycloid (the evolution or evolvent), and he created a new branch of mathematics, the theory of evolutes, to do it. The problem reduced to finding a curve such that
So an isochronous pendulum must be constrained to move along a cycloidal path. Huygens needed to find the curve (the evolute) that would “unwind” to form this cycloid (the evolution or evolvent), and he created a new branch of mathematics, the theory of evolutes, to do it. The problem reduced to finding a curve such that
- Each leaf is tangent to the centerline.
- Each leaf is perpendicular to the cycloidal arc of the pendulum at its point of contact.
- The leaf length to the point of contact with the bob equals the pendulum length, so it must have an arc length of twice the diameter of the circle generating the cycloidal path of the pendulum, which is half the cycloid measured from its base to vertex.
This leads to the fact that the evolute must be a curve having the same base, height and length as the cycloidal path of the pendulum, and Huygens came to the startling realization that the evolute is a cycloid generated by the same circle as the cycloid derived for the pendulum path, or in other words, the cycloid is its own evolute! (In 1692 Jacob Bernoulli showed that a logarthmic spiral also is its own evolute.)
But for a practical pendulum Huygens further proposed that it is necessary to know its “center of oscillation,” and using an axiom equivalent to the conservation of energy he defined the center of gravity of a pendulum in terms of the modern concept of its moment of inertia. Taking the limits of infinitesimal points of mass, he calculated the centers of oscillation of many types of pendulums; for example, his spherical bob of radius r on a weightless string produced a center of oscillation 2r2/5L below the center. This provides the analysis of the effect of sliding weights on pendulums to adjust for (or measure) geographical differences. He derives the practical technique of using the period of a known pendulum to find g, the acceleration due to gravity of free-falling bodies. Finally, Huygens describes the conical pendulum and produces theorems on centrifugal force equivalent to (but preceding) Newton’s F=mv2/r. This is the only place where force appears, as his work is based on the concept of conservation of energy, still a popular approach to physical problems involving complicated motions.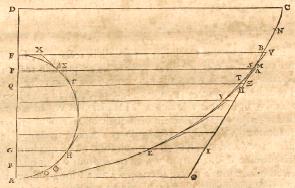
The Horologium Oscillatorium was written in the style of geometric physics in which quantities are related by proportions demonstrated with geometric constructions, a method soon superseded by the analysis tools of mathematical physics. But Huygens used infinitesimal time intervals and distances and extrapolated them to limiting cases, prescient in his anticipation of the development of the calculus. Blackwell points out that while later physicists relied on the extensive foundations of calculus and mechanics to build arguments, Huygen’s work “may be enjoyed as a beautiful specimen of [his] explicit handling of physical concepts and argument.” It is a self-contained jewel with a brilliant clarity seen in great works of all fields.
 As an example of the practical nature of Huygens, he provides in this work an alternative method of drawing a cycloid that is shown in the figure on the left. Equal arcs AC, CD, and so forth are drawn on a circle whose diameter is half the length of the pendulum. Now join these points with horizontal lines and construct LM as the arc length AF, divided into as many parts as points marked off on AF. Then on the horizontal lines mark GO and CN with lengths equal to one part of LM, then HQ and DP with lengths equal to two parts of LM, etc. The curves connecting these points are the required cheek curves for the given length of the pendulum. To construct LM from the arc length AF, XZ is drawn equal to the sum of the two chords of half of AF. Then overlay XY as the length of the chord of AF. Finally add ZΔ as 1/3 of YZ. Then if AF is 1/6 or less of the circumference of the circle, XΔ equals AF to 1 part in 6000. What strikes me about this construction is that it creates an approximate solution, something I wouldn’t expect from a geometric construction and surely an indication of how closely Huygens aligned his mathematics with the practical construction of mechanical clocks.
As an example of the practical nature of Huygens, he provides in this work an alternative method of drawing a cycloid that is shown in the figure on the left. Equal arcs AC, CD, and so forth are drawn on a circle whose diameter is half the length of the pendulum. Now join these points with horizontal lines and construct LM as the arc length AF, divided into as many parts as points marked off on AF. Then on the horizontal lines mark GO and CN with lengths equal to one part of LM, then HQ and DP with lengths equal to two parts of LM, etc. The curves connecting these points are the required cheek curves for the given length of the pendulum. To construct LM from the arc length AF, XZ is drawn equal to the sum of the two chords of half of AF. Then overlay XY as the length of the chord of AF. Finally add ZΔ as 1/3 of YZ. Then if AF is 1/6 or less of the circumference of the circle, XΔ equals AF to 1 part in 6000. What strikes me about this construction is that it creates an approximate solution, something I wouldn’t expect from a geometric construction and surely an indication of how closely Huygens aligned his mathematics with the practical construction of mechanical clocks.
And maybe that’s what makes the Horologium Oscillatorium such a fascinating piece of work. Mahoney points out something I hadn’t noticed, that there are three layers of meaning in the diagrams and sketches of Huygens. In this work we see the overlay of physical shapes (the pendulum cord and cheeks) onto geometric constructions proving theorems about those shapes. In notes from 1659 in which Huygens first finds the cycloid as the isochronous curve, he also overlays an auxiliary curve, a parabola that describes the velocity of the bob as it moves along the cycloid. He created “a curve in physical space, the properties of whose normal and ordinate could be mapped by way of a mathematical curve so as to generate another mathematical curve congruent to a graph of velocity against distance” [Mahoney]. Later we will see that Huygens created a mathematical relation that defines isochronous systems, thereby lifting the mathematics out of the geometrical physics and anticipating analysis as the new physics.
 In this work Huygens also studied conical pendulums (in which the bob swings in a horizontal circle rather than in a vertical plane) as well as compound pendulums. He also designed pendulums for use aboard ships, a rocking platform for which pendulum clocks were never successfully produced. For this environment Huygens in 1672 created a clock that utilized a triangular pendulum, that is, one that is suspended from two separated cords and thereby constrained to move in one plane only, theoretically eliminating most effects of the rocking of the ship. The clock itself was suspended first in a ball-and-socket mount and later on gimbal mounts in an attempt to eliminate rocking in the plane of pendulum motion.
In this work Huygens also studied conical pendulums (in which the bob swings in a horizontal circle rather than in a vertical plane) as well as compound pendulums. He also designed pendulums for use aboard ships, a rocking platform for which pendulum clocks were never successfully produced. For this environment Huygens in 1672 created a clock that utilized a triangular pendulum, that is, one that is suspended from two separated cords and thereby constrained to move in one plane only, theoretically eliminating most effects of the rocking of the ship. The clock itself was suspended first in a ball-and-socket mount and later on gimbal mounts in an attempt to eliminate rocking in the plane of pendulum motion.
Huygens later invented the ingenious tri-cordal pendulum, a ring suspended at three points by threads and made to oscillate around its center as shown in his sketches below. Radial placement of weights could be used to calibrate the pendulum. From his analysis of conical pendulums he discovered that this mechanism would be isochronous if any point of the ring moves along a parabola curved around the cylinder defined by the ring. To fine-tune the tri-cordal pendulum to this constraint he considered adding cheeks but eventually just went with longer threads.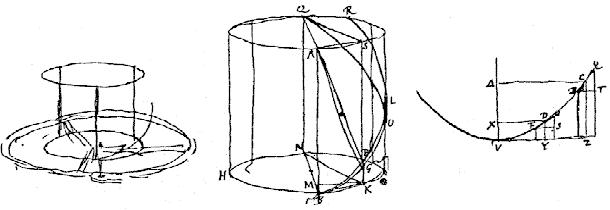
After the publication of his Horologium Oscillatorium, Huygens found that in a cycloidal pendulum the force on the bob is proportional to the distance or angle from the neutral position, and he deduced that any mechanical system that met this constraint would be isochronous. He came up with a number of mechanisms of this type. In 1675 this led him to invent the horizontal balance spring as a clock oscillator, in which the force varies directly with angle in the same way that force varies directly with distance in ordinary springs, although Hooke did not publish his law on this until 1678. (There is some debate today on whether Hooke actually invented the balance spring.)
 But the elasticity of the balance spring suffered under temperature variations, and in 1693 Harrison revisited notes he made in 1684 to create the “Perfect Marine Balance.” Here the spring balance was replaced with something like a physical pendulum, a balance bar on a knife edge swinging in a vertical plane and controlled by another weight suspended by a thread from cycloidal cheeks that are mounted on the balance shaft and oscillate with the balance. To get the returning force to vary directly with the angle, he experimented with a weighted chain arrangement and with a float partly submerged in oil or mercury.
But the elasticity of the balance spring suffered under temperature variations, and in 1693 Harrison revisited notes he made in 1684 to create the “Perfect Marine Balance.” Here the spring balance was replaced with something like a physical pendulum, a balance bar on a knife edge swinging in a vertical plane and controlled by another weight suspended by a thread from cycloidal cheeks that are mounted on the balance shaft and oscillate with the balance. To get the returning force to vary directly with the angle, he experimented with a weighted chain arrangement and with a float partly submerged in oil or mercury.
Meanwhile, in 1670 the anchor escapement was invented, possibly (and certainly claimed) by Robert Hooke. Some authors attribute its discovery to Thomas Tompion (1639-1713), but a more correct attribution may be to William Clement (1643-1710) [Heldman]. The workings of this escapement are outside the scope of this essay, but its effect on pendulum design was significant because it was used to reduce the pendulum swing to 4-5°. (It is worth noting here that the verge escapement can have as small an angle of escape as desired by designing very long pallet arms and a large distance between the horizontal escape wheel and the pivot arbor for the pallets and crutch—there are provincial French pendulum clocks, mostly of the 19th century, with this arrangment [Heldman]. But certainly the anchor escapement triggered clock designs at the time that had small-angle swings.)
A reduced pendulum swing makes possible much longer pendulums for a given horizontal space. Clocks with 14ft. pendulums were built, for example, and Tompion produced a clock with a 13ft. pendulum hung above the movement. Longer periods are more directly geared to clock time, but the small swing provided by the anchor escapement also significantly reduced friction at the pivot point. And now that the swing was small, the silk cords that rolled over the cycloidal cheeks were replaced with a short strip of flat metal (a brass suspension spring) that simply flexed around the shorter arc of the cheeks, decreasing the friction even more. When a metal rod and bob were connected to the strip, the entire pendulum manifested a permanent, all-metal construction. It might be noted here that Huygens and others looked to long, slow pendulums for stability, but in fact more success in pendulum clocks was ultimately had with short, fast-moving pendulums.
The other major problem with pendulums was the change in length, and therefore the center of gravity, with temperature. Huygens never fully realized the effect of temperature on his clocks. On hot days a pendulum lengthens slightly and the clock slows, and the opposite happens on cold days. George Graham (1673/4-1751) attempted to devise a pendulum using the varying expansion rate of metals to remain isochronous over temperature ranges. In these designs the expansion in temperature of one metal is offset by the expansion of the other, designed so that the net length of the pendulum remains constant. Failing to arrive at a suitable design, Graham settled on mercury-compensated pendulums as his solution. Here the pendulum is designed to hold mercury in a glass cylinder in much the same way as a mercury thermometer. When the pendulum length increased with temperature, the mercury expanded as well, and vice-versa. When properly designed, the net center of gravity of the pendulum remained unchanged regardless of temperature variations. Ingenious! Graham also invented the deadbeat escapement that made for quite small pendulum arcs.
(As an interesting notion Matthys mentions that if a pendulum is not temperature compensated, one might support the bob at the bottom edge. In this way the upward expansion of bob partially compensates for downward expansion of pendulum rod.)
 John Harrison (1693-1776) approached Graham in 1730 with his invention of the “gridiron pendulum.” Graham, a respected member of the Royal Society in London (and considered a humble, generous man according to all references I’ve seen), encouraged Harrison to pursue it, and it is the design seen in serious grandfather clocks (but faked in most commercial ones sold today). The design from a later clock is shown in the figure here. The expansion of brass rods in the pendulum compensates for the expansion of iron rods in order to keep the effective length the same over temperature. The key is to have a high ratio between the thermal coefficients of the two metals used in the gridiron. If the ratio is 2:1, two rods can be used to expand downward and one rod upward, and so forth for different ratios. Anything less requires more rods to achieve the ratio. The ratio for iron and brass is 1.7:1, so Harrison used three rods expanding downward and two upward, and included two of these sets to equalize the weight. Since one rod can be common to both sets, nine rods were needed.
John Harrison (1693-1776) approached Graham in 1730 with his invention of the “gridiron pendulum.” Graham, a respected member of the Royal Society in London (and considered a humble, generous man according to all references I’ve seen), encouraged Harrison to pursue it, and it is the design seen in serious grandfather clocks (but faked in most commercial ones sold today). The design from a later clock is shown in the figure here. The expansion of brass rods in the pendulum compensates for the expansion of iron rods in order to keep the effective length the same over temperature. The key is to have a high ratio between the thermal coefficients of the two metals used in the gridiron. If the ratio is 2:1, two rods can be used to expand downward and one rod upward, and so forth for different ratios. Anything less requires more rods to achieve the ratio. The ratio for iron and brass is 1.7:1, so Harrison used three rods expanding downward and two upward, and included two of these sets to equalize the weight. Since one rod can be common to both sets, nine rods were needed.
Well, just about. Harrison was also the first to realize the effect of atmospheric density on the period of a pendulum. Colder temperatures produce higher air densities, which alter the buoyancy of the bob and therefore the restoring torque. Another factor, absolute humidity, affects the density and viscosity and thence the rate of energy loss, equilibrioum amplitude and period of a pendulum [Emmerson]. From experiments performed with evacuated bell jars, Harrison adjusted his gridiron pendulum to account for the effect of temperature-induced density changes as well as for thermal expansion! Harrison also first confronted the effect of air resistance after he invented the grasshopper escapement—the frictional losses were now so low in his clock that the pendulum swung wildly until he attached small vanes to the pendulum. Air resistance is important, as over 90% of the drive energy imparted to a pendulum is lost through air drag. (Actually, some amount of air resistance can provide stability to the amplitude of the pendulum swing.) Through this and many other innovations Harrison claimed a pendulum clock accuracy of 1 second per month, an achievement still very much envied (and challenged).
There are other aspects of pendulums that are not considered here. For example, two or more pendulums that are lightly coupled (such as in clocks sitting on the same mantelpiece) will synchronize their swings, but in the opposite direction. Huygens made the first observation of a coupled oscillator in just this way in 1665 while recovering from an illness. For unconstrained simple pendulums with the same natural period, such a loose coupling results in a modal phenomenon in which the total swinging motion moves back and forth between them. Highly coupled oscillators, such as a compound pendulum where one pendulum is hung from the bob of another, exhibit chaotic motion. Coulomb used a torsion pendulum in 1784 to quantify the electrostatic force, and Cavendish determined the density of the Earth in 1798 using a pendulum. Foucault also famously used a pendulum in 1851 to directly demonstrate the rotation of the Earth. But in the end my fascination lies with the creative, technical pursuits seen in the early designs of pendulum clocks.
References
Andrewes, W. J. H. (Ed.). The Quest for Longitude: The Proceedings of the Longitude Symposium Harvard University, Cambridge, Massachusetts, November 4-6, 1993. Cambridge: Collection of Historical Scientific Instruments, Harvard University (1996). Wow, is this a neat book, a lavishly illustrated collection of fascinating essays by experts in horology on the pursuit to determine the longitude of a person at sea, a huge historical problem. Essays that provided information for the present essay include The Longitude Timekeeper of Christiaan Huygens, by J.H. Leopold; ‘John Harrison, Clockmaker & Barrow; Near Barton upon Humber; Lincolnshire’: The Wooden Clocks, 1713-1730, by Andrew L. King; and The Scandalous Neglect of Harrison’s Regulator Science, by Martin Burgess.
Emmerson, Alan. The papers in Horological Science by Mr. Emmerson presented here are a pedagogical treat, presenting clear mathematical explanations of pendulum physics such as the non-isochronous behavior of a rigid pendulum suspended between cheeks as mentioned in this essay.
Heldman, Alan W. Personal Communications. Mr. Heldman’s horological knowledge led to several corrections and improvements to this essay, which is much appreciated.
Huygens, Christiaan. The Pendulum Clock or Geometrical Demonstration Concerning the Motion of Pendula as Applied to Clocks, Translated with Notes by Richard J. Blackwell. Ames: Iowa State University Press (1986 translation of 1673 Horologium Oscillatorium). Surprisingly, this is the first English translation of Huygens’ book, and it’s a really interesting read. This is also the culminating scientific work presented as geometrical physics (i.e., using geometric constructions as derivations and proofs, with relations between quantities of different dimensions expressed as proportions rather than equations). Later works by others trended toward analytical approaches, particularly following the invention of calculus. Interestingly, Blackwell also notes that this book is based on an axiom equivalent to the conservation of energy rather than the concept of forces developed later by Newton. An actual scan of the 1673 book from which the manuscript figures of this essay were drawn is found at http://kinematic.library.cornell.edu:8190/kmoddl/toc_huygens1.html.
King, Henry C. Geared to the Stars: The Evolution of Planetariums, Orreries, and Astronomical Clocks. Toronto: University of Toronto Press (1978). An encyclopedic, out-of-print work on a niche subject that is quite an expensive volume to buy on the used market. I was able to borrow it from a local library.
Mahoney, Michael S. Various fascinating papers, most of which involve Huygens, can be found at http://www.princeton.edu/~mike/17thcent.html. In particular, details of Huygens’ original cycloidal derivations from 1659 can be found in Christiaan Huygens: The Measurement of Time and Longitude at Sea, and an interesting discussion of the physical and mathematical layers within Huygens’ drawings is presented in Drawing Mechanics.
Matthys, Robert J. Accurate Clock Pendulums. Oxford University Press (2004). Lots of practical advice can be found in this book.
Printer-friendly PDF of this post.

I have been trying to set my pendulum clock for a couple of months now and for the life of me can not figure out whether moving the bob up speeds up the clock or slows it down. I realize the speed of the clock is somewhat dependent on the distance of the bob. Does the bob move faster when farther away or slower? Any help would be great.
Thanks
Hi Gregg. All other things being equal, the period of a pendulum increases as the bob moves further from the pivot point, so the clock slows down. The approximate equation for the period T of a pendulum in terms of the acceleration g due to earth’s gravity, the constant pi, and the length L (measured from the pivot point to the center of mass) is T = 2π(L/g)1/2, so the period increases as the square root of the length. In other words, if we assume all the mass is located in the bob, doubling its distance will increase its period by a factor of 21/2=1.414. The exact equation for the period of a pendulum is not expressible as a finite equation like this, but it turns out that the period calculated from it also varies directly with the square root of L. Perhaps your inconsistent results are due to changes happening in the amplitude of the pendulum swing when you move the bob—larger swings of a pendulum increase its period, and here the exact equation can be approximated as T = T0(1 + θ2/16), where T0 is the small-angle period calculated from the earlier formula and θ is the amplitude (angle) of the swing. So if the swing increases as a side effect of moving the bob closer to the pivot point, then they will have opposing effects on the period that can make understanding what is going on much more difficult. — Ron D.
LikeLike
I find it interesting that it has been demonstrated that it is impossible to make a perfect pendulum on Earth. In the ’50’s, a Russian (I have his name somewhere) developed the “perfect” pendulum using counter operating suspension springs to achieve true cycloidal motion without friction. The pendulum was detached to avoid interference and incorporated every conceivable refinement for temperature, pressure, etc. It worked great, except it was so precise it was affected by the tides and gained or lost time depending on the relative position of the moon.
I hadn’t heard of this. Alan Emmerson also refers to it in a later comment below. — Ron
LikeLike
A comment I have to do on the response of Ron D. to Gregg (#2 question, above) is that the pendulum period is actually affected by the angular amplitude (Ron D. named ”θ”), but the formula T=T0(1+θ2/16) suggested by Ron is poor in comparison to a logarithmic one I introduced in one of my recent works [American Journal of Physics vol. 74 (10), p.892 (2006)]. Take a look and help me to disseminate this interesting approach to the pendulum period (if you wish I can send you a PDF copy by e-mail). Thanks.
Thanks for the pointer! I’ve read through your paper (which can be downloaded as http://arxiv.org/vc/physics/papers/0510/0510206v1.pdf) and you’re absolutely correct. For the information of others here, the approximation I provided (from the truncation of a series by Bernoulli) is calculated in the paper as having an error of 0.1% and 0.5% for amplitudes of 41° and 60°, respectively. Dr. Lima derived a logarithmic approximation by linear interpolation of the denominator in the elliptic integral of the exact solution, yielding T = -T0 ln(a)/(1-a), where T0 is the small-angle formula and a = cos(θ/2). This formula exhibits an error of 0.1% and 0.2% for amplitudes of 74° and 86°, respectively. This is a significant improvement for such a simple formula, and as the paper points out, this is increasingly important as today’s electronic timers and detectors are available to students in physics labs. Thanks again for taking the time to comment on this. — Ron
LikeLike
Dear R. Doerfler,
I’ve just submitted that other paper on the large-angle pendulum period to Am. J. Phys. This complete version will soon be posted on the Cornell “arxiv” and then you can post a copy on your WebSite. You will surely be glad to know that I included you at the Acknowledgments, at the end of the paper.
After some days of rest I’ll try to solve some (several)century-old problems in Mathematics, namely the determination of a closed-form for zeta(3) = sum(1/(n^3), n=1..infinity) and also the Catalan constant [=sum((-1)^(n-1)/((2n-1)^2), n=1..infinity)]. I think this will demand at least one year. In the meantime I intend to treat some other problems in quantum physics.
Thanks,
Fabio M. S. Lima
LikeLike
Liked your pendulum paper. The so called barometric effects are not actually caused by pressure variation. Bouyancy change due to density change due to temperature change alters the restoring torque, absolute humidity change alters density and viscoscity and thence rate of energy loss, equilibrium amplitude and period.
The name of the Russian was Feodsii Michailovich Fedchenko. The path followed by the centre of mass of his pendulum has not been determined but it probably was not cycloidal.
All pendulum clocks can sense the lunar solar efffect ie tides. It’s just that the variation is swamped by other sources of instability.
You will see some papers on these subjects on my website.
Incidentally I reckon the term used to be deduced reckoning. Dead reckoning is a coruption.
Alan
Thanks for the correction on the barometric effects, Alan. I’ve updated the essay to incorporate your changes as well as some I received from others via email. I’ve also read that “dead reckoning” comes from “deduced reckoning” and here I’m corrupting it even more with wordplay by implying dead forms of math reckoning. 🙂 I’ve also added your website to the list of references at the end of the essay—your papers on that site are fascinating, just the kind of thing I’m aiming for in this blog! — Ron
LikeLike
Perhaps the most accurate pendulum clock ever built was constructed by Prof. E.T. Hall in the 1990s.
http://www.hsn161.com/hsn_article.php
http://www.telegraph.co.uk/news/obituaries/1337670/Professor-E-T-Teddy-Hall.html
It used an elaborate computerized control system that monitored the motions of the pendulum with an LED and photocell so that nothing needed to physically contact the pendulum and an electromagnet gave it precisely enough energy to keep its swing at a constant amplitude. Temperature was controlled to a fraction of a degree Celsius. To reduce the effect of vibrations, he built an elaborate support structure with about 12 tonnes of concrete. He managed accuracy about an order of magnitude better than the Shortt free pendulum clock of the 1920s
http://en.wikipedia.org/wiki/Escapement#Free_pendulum_clock
Wow, his clock simply amazing to read about. At the moment I’m reading “My Own Right Time: An Exploration of Clockwork Design” by Philip Woodward, from a recommendation of an horologist who contacted me. What a great book–it’s his story of how he started out knowing very little about pendulum clocks and his failures and successes in trying to design the most accurate one he could. It’s extremely readable with a light air, while delivering a great deal of technical information. (It’s also extremely expensive new at Amazon, so mine’s through interlibrary loan!) — Ron
LikeLike
this site is awesome
LikeLike
I am looking for a pendulum for my Japanese gravity clock. Can you help?
Hi Donald. I’m sorry, but I don’t have any suggestions for you. If anyone else here who is familiar with this clock has a suggestion, please leave a comment here. Thanks. — Ron
LikeLike
Fascinating, even if a lot of the maths is beyond me. But one thing puzzles me, re the temperature compensation – this sentence: “If the ratio is 2:1, two rods can be used to expand downward and one rod upward, and so forth for different ratios.” Isn’t it the relative lengths, not the number of rods? ie if the ratio of expansion coefficients is 1:2 then one rod of length x will require another with length x/2 to compensate, and the doubling up of rods either side was just for reasons of mechanical construction or avoiding a bending moment?
LikeLike
I came across your blog from Make Magazine and I thoroughly enjoy it. The works of John Harrison have captivated me since I read Longitude by Dava Sobel in high school. It was at that point that I realized all the science, math, and engineering I take for granted. A pair of 12 dollar wristwatches would have been a godsend in the 1700s. But I digress, I enjoy the site and look forward to future posts.
Thanks, Benji. I haven’t posted lately but I’ve been very busy working on these types of things so there are essays in the pipeline. — Ron
LikeLike
Very interesting article. Pendulums are a very rich topic. I google “pendulum” every once in a while and came across your site. I wrote my Master Degree Thesis on the chaotic response of forced pendulums. I find them of interest, obviously. I appreciate your article! Nice work. A summary of my work on the topic follows for those interested in pendulums. My university recently sent me a pdf file of the many-year-ago effort. Posted it on Scribd. Some here might find it of interest. Who would think an oscillating mass would have such fidelity and breadth of application and theory. A link to the full work is: http://www.scribd.com/doc/26783252/Fred-C-Thomas-III-BU-MSME-Thesis-Chaos-Theory-Demo-Machine-1990
Forced Chaotic Pendulum Paper Description:
A sinusoidally-forced, large-amplitude pendulum was designed and built to demostrate the chaotic behavior that can arise in a simple nonlinear system. Following a brief review of the terminology associated with the study of chaos, the design of the forced pendulum, dubbed The Chaos Machine, is presented. Special attention is given to the electronic control system used to produce the sinusoidally varying torque that drives the pendulum. Standard frequency response techniques and time-domain simulations are used in the design of the control system. Finally, typical responses of the pendulum are presented that demonstrate phase-locked periodic and chaotic nonperiodic motion. The Chaos Machine promises to be a useful tool for teaching undergraduate students about nonlinear system dynamics.
Thanks, Fred! I read through your entire thesis and found it to be the clearest explanation of chaos theory that I have encountered! I’ve never had detailed knowledge of chaos theory, so it was refreshing to learn about it from such a well-written (and apparently letter-perfect!) source. The reason that a simple pendulum has a linear response at small angles is very apparent from your explanation of the difference between the approximate linear and exact non-linear differential equations governing it (the use of theta rather than the actual sin(theta) in the equation).
I hope you are a science or electrical engineering teacher now, because you have a real flair for explaining things. It took me a long time (years, in fact) to realize the importance to the engagement of the reader of starting from basic principles even though they are already known by the reader. Even today I struggle to write clearly, and my attempts on this blog represent many false starts, stops and edits.
Hey, I just went to your website link–I’ve been there before to your page on charts and nomographs! I see you have pages on many educational topics.
Thanks again, Fred, for putting your thesis online. I enjoyed reading it, and I found a very old friend in the LM741 op-amp! I used them back in the early 80’s to make (among other things) a closed-loop control system for the electromagnetic field of a large spectrometer by measuring the energy loss in an electrical circuit from the magnetic resonance of a glycerin tablet rotating in the field. Cheers! — Ron
LikeLike
Thanks for your kind comments Ron! I still do enjoy writng a bit, but I am an engineer and spend most of my time working on developing new products. Work in the PC business now, after working on data storage devices for 15 years (Zip drive etc.), prior to that I had an instrument business and prior to that worked in the defense electro-optics business. Pretty chaotic-pendulum-like career, but there is a strange attractor central to it all 😉 — an opportunity to work on some innovative stuff. Well, thanks again for the kind comments and glad you enjoyed the read. You might be the 6th or 7th person to read it!
LikeLike
I have adjusted the screw on my pendulum as far down as it will go, but the clock still gains 5 minutes every 12 hours. I saw the suggestion of adding weight to the pendulum (say some paper clips?) Will that work?
Hi Sam. It would be worth a try. Sometimes there is friction in the pendulum or gearwork mechanism and a bob with more mass would have more momentum that might overcome the frictional effects that are not considered, or insufficiently accounted for, in theoretical results. Good luck, I hope it helps. Let me know either way. — Ron
LikeLike
Dear Sir,
The factor to the small-amplitude period for larger amplitudes can be written as a rational a/b where a = 6303 + c and b = 6303 – 11c and c =(w/10)^2, amplitude w in degrees! The formula is found by writing the factor as a continued fraction and then evaluate.
Really! I didn’t know that. I know that rational expressions are very powerful tools in analysis, much more capable of fitting curves than polynomials, but I hadn’t encountered this factor for large pendulum amplitudes. This is very interesting to me—thank you very much! — Ron
LikeLike
Ron:
Interesting article; thank you! I have a couple of comments, though, about F. M. Fedchenko and his clock:
1. Fedchenko was Ukranian, not Russian, although that might be confusing since Ukraine was part of the USSR during the period he was active. He worked at the Kharkov State Institute of Measures and Measuring Instruments. What papers I can find of his that were published in the USSR were of a Moscow imprint.
2. Fedchenko’s suspension caused the pendulum to be isochronous only over very small magnitudes of arc (60 to 150 minutes of total arc, or 30 to 75 minutes each side of the rest position).
3. My analysis shows that his pendulum suspension did alter the path of the center of mass of the pendulum, but not quite along a cycloidal path. The construction of the suspension consisted of three sheet metal springs, the center spring being longer with pinnings vertically offset in relation to the other two. This arrangement caused the center spring to buckle and impart a restoring force in addition to that of gravity. This wasn’t a really new idea in horology; it had been attempted many times before, albeit with purely mechanical clocks whose pendulums had much, much greater magnitudes of arc.
LikeLike